You can acquire the information of one global position in the world from the map data structure directly with this Embedded version. Just build this package first in your workspace, include the header file #include <mlmap.h> in your project, and use the interface functions. The initialization only need the ros nodehandle, and it receive the ros messages automatically to build the map. Check nodelet_map.cpp for the detail guidance. It is very fast, and most map update steps can be finished within 2 ms.
Interface functions
Set the status of one piece of the entire map into free (input the min and max corner coordinate of the region):
mlmap::setFree_map_in_bound(Vec3 box_min, Vec3 box_max);
Get the status of the queried position (return -1 for unknown, 1 for free, 0 for occupied):
int mlmap::getOccupancy(Vec3 pos_w);
Get the odds of 'occupied' of the queried position:
float mlmap::getOdd(Vec3 pos_w);
Get the gradient of the odds of the queried position (the gradient is a vector heading to the neighboring cell of the lowest odds of occupancy):
Vec3 mlmap::getOddGrad(Vec3 pos_w);
The latest demo (red dots are the frontiers of the un-explored space, write for exploration task):

The odds map (red for low odds and blue for high odds) and the odds-gradient of those occupied cell (odds > 0.8), represented by the white lines:

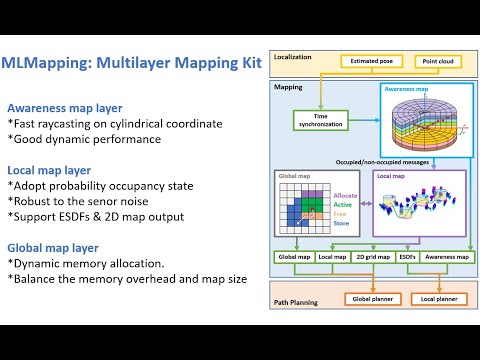
MLMapping is a multilayer mapping framework designed for autonomous UAV navigation applications. In this framework, we divided the map into three layers: awareness, local, and global. The awareness map is constructed on the cylindrical coordinate, which enables fast raycasting. The local map is a probability-based volumetric map. The global map adopts dynamic memory management, allocating memory for the active mapping area, and recycling the memory from the inactive mapping area. The framework supports different kinds of map outputs for the global or local path planners. This version adopts a hybrid data structure to achieve dynamic memory management and merge the local and global layers into one layer. In this new mapping toolkit, we can query the occupancy of any given global position quickly and the mapping area is not limited by the pre-allocated RAM (that is what happened in the original local map layer). Also, the occupancy odds are consistent in the whole mapping ragion and can be queried quickly, too. Please note that ESDF function is not needed anymore since we hope odds gradient can replace the distance gradient in trajectory optimization.
| Fast Raycasting | Large Scale Mapping | Autonomous UAV Navigation |
|---|---|---|
 |
 |
 |
Clone this repository to catkin src folder say: ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/PAIR-Lab/MLMapping.git
Install 3rd Part library
cd catkin_ws/src/MLMapping/3rdPartLib/
./install3rdPartLib.sh
Compile
cd ~/catkin_ws/
catkin_make
Download the Large Scale Mapping Dataset into the bag folder
decompress the rosbag
rosbag decompress corridor.bag
run (modify the path of the ROS bag first in the launch file)
roslaunch mlmapping mlmapping_bag_sim2.launch
Han Chen(Dept.AAE,PolyU): stark.chen@connect.polyu.hk
Shengyang Chen(Huawei Technologies Co., Ltd): shengyang.chen@connect.polyu.hk